

small stepper motor 5V DC, 0.1A, 0.03Nm Torque
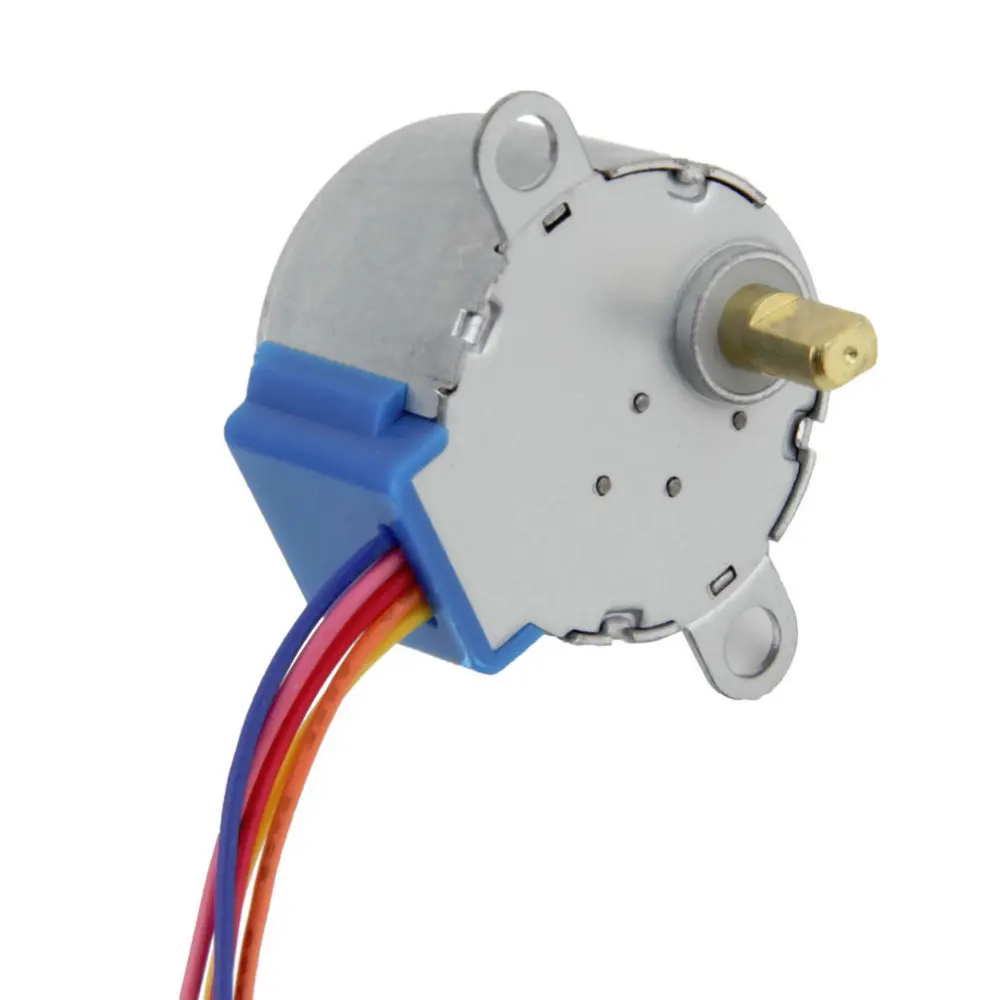
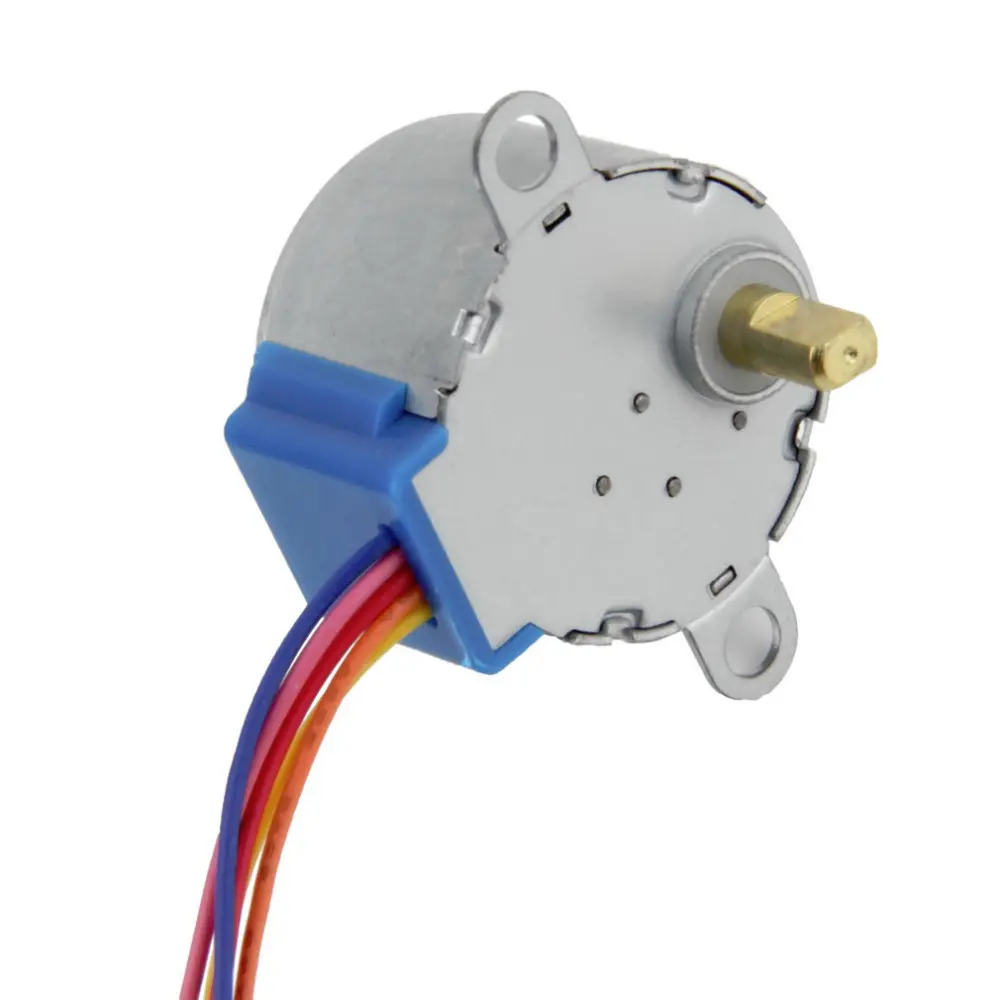
28BYJ-48 Stepper Motor – 5V DC, 0.1A, 0.03Nm Torque
The 28BYJ-48 is a widely used 5V DC stepper motor ideal for precise control of position and speed in embedded and robotic systems. It offers low current draw, high reliability, and works seamlessly with ULN2003 driver boards and Arduino microcontrollers for plug-and-play motion control.
⚙️ Features
Operates on 5V DC
Internal gear reduction for torque and precision
Step angle: 5.625°/64
Compact and affordable
Commonly used in Arduino projects, 3D printers, and automation systems
📊 Technical Specifications
| Parameter | Specification |
|---|---|
| Operating Voltage | 5V DC |
| Rated Current | 0.1 A |
| Torque | 0.03 Nm |
| Step Angle | 5.625° / 64 (with gear ratio) |
| Gear Ratio | 1:64 |
| Shaft Type | Flat |
| Phase | 4-phase, 5-wire |
| Dimensions | 28 mm diameter |
| Drive Compatibility | ULN2003, L293D (with 5-wire adapter) |
🔌 Wiring with Arduino (Using ULN2003 Driver)
Connect the 28BYJ-48 motor to ULN2003 driver board (matching the 5-wire plug).
Connect the ULN2003 IN1–IN4 pins to Arduino digital pins (e.g., D8 to D11).
Power the motor with 5V and GND from Arduino or external power (recommended if using multiple motors).
| ULN2003 Pin | Arduino Pin |
|---|---|
| IN1 | D8 |
| IN2 | D9 |
| IN3 | D10 |
| IN4 | D11 |
💻 Sample Arduino Code
#include <Stepper.h> const int stepsPerRevolution = 2048; // 28BYJ-48 with gear reduction Stepper myStepper(stepsPerRevolution, 8, 10, 9, 11); // Pin order may vary void setup() { myStepper.setSpeed(15); // RPM } void loop() { myStepper.step(stepsPerRevolution); // One full revolution delay(1000); myStepper.step(-stepsPerRevolution); // Reverse delay(1000); }
🛠️ Applications
Robotics (precise position control)
Automated blinds, locks, and levers
3D printers and CNC systems
Camera sliders and focus systems
Educational mechatronics projects